Current

Robot Learning from Video Demonstrations in Kitchen
Jan 2022 – Present, Carnegie Mellon University, Pittsburgh, PA
Supervisor: Prof. Chris Atkeson
- Improved object pose estimation results with multi-view voting, filters, and hand-object relationships
- Set up a data collection system in kitchen to record dish washing videos with eight RGB-D cameras
- Implementing optimal control algorithms to detect and classify motor primitives in videos
Past
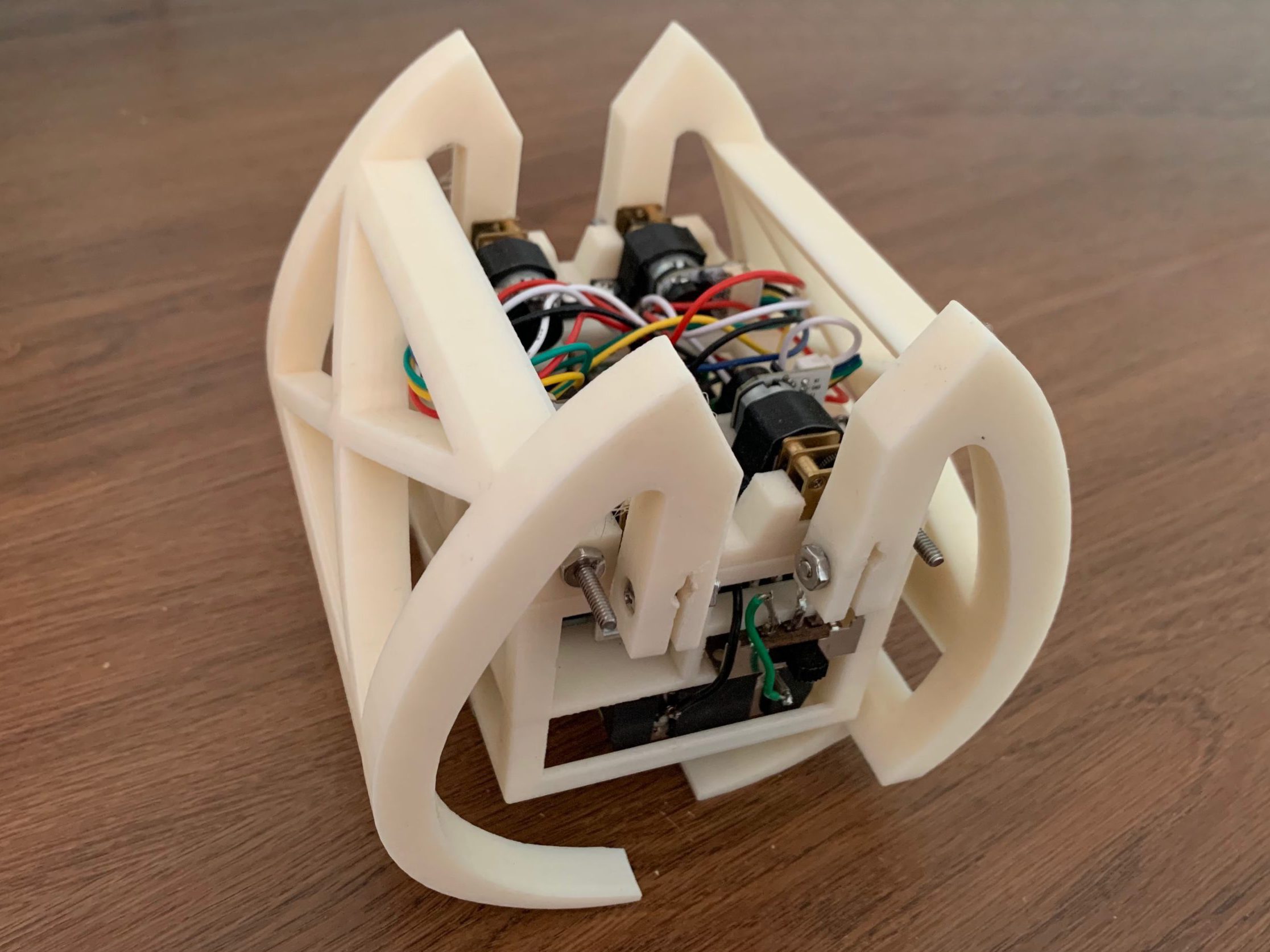
Walking-to-Rolling Robot Automatic Feedback Controls
Sep 2019 – Apr 2021, University of Michigan, Ann Arbor, MI
Supervisor: Prof. Kenn Oldham
- Prototyped a robot with four 10-cm curved-beam legs as a testbed for small scale locomotion and control
- Developed control strategies to achieve smooth walking-to-rolling transitions with only two degrees of freedom
- Developed control circuitry to fit motors, encoders, batteries, and an Arduino board into the small robot body
- Implemented adaptive outer loop control of the robot with PID control on legs to maximize forward velocity

Uncertainty Quantification in Machine Learning Models
Sep 2018 – Dec 2020, University of Michigan, Ann Arbor, MI
Supervisor: Prof. Xun Huan
- Analyzed sensitivity and robustness of deep neural network models for medical diagnosis
- Developed systematic capabilities to assess ML models on high-performance computing (HPC) systems
- Optimized and validated a practical inference algorithm for Bayesian neural networks

Mountain Hazards and Environment Analysis
Jun 2016 – Jul 2016, Chinese Academy of Science, Chengdu, China
Supervisor: Prof. Siming He
- Analyzed hypsographic images with AutoCAD to assess risks of disasters
- Conducted a field trip around a dam to evaluate potential disasters
- Worked with professors to translate files and edit presentation slides